Man Zaidner and Dr Mitch Pryor are researchers from The College of Texas at Austin who’ve developed Vaultbot – a Husky-based robotic constructed to enhance situational consciousness within the teleoperation of dual-arm cellular robots, particularly in hazardous and unsure environments.
The Challenges of Robotic Teleoperation
In relation to hazardous and unsure environments, utilizing a robotic as a substitute of an individual looks like an excellent thought. Nonetheless, oblique teleoperation – the act of controlling a robotic remotely – is usually very difficult as a result of lack of correct visible suggestions. For instance, video feeds are sometimes low decision with low FPS (body per second), have restricted FOV (discipline of view) and undergo from excessive latencies.
There are a lot of challenges relating to teleoperating a robotic. To start with, the operator must be outfitted with varied wearable gadgets similar to a head mounted show (HMD), in addition to drive and haptic suggestions gadgets. Whereas these gadgets could improve the quantity of data an operator is ready to absorb, they’ll additionally give the operator movement illness.
One other concern is that working a robotic utilizing an ordinary 2D monitor may be difficult as a result of lack of perceived depth and restricted discipline of view (FOV).
The final concern that has been outlined on this analysis is the lag or the round-trip latency between the operator and the robotic which can result in unstable management of the robotic. A latency greater than 50-100 ms could trigger the operator to assume that the system just isn’t responding after which re-execute the order which is able to trigger an overreaction.
All of those points are what result in a Situational Consciousness (SA) downside, which the group defines as “the notion of environmental components and occasions with respect to time or area, the comprehension of their that means, and the projection of their future standing.”
Aspect view of one of many teleoperated Vaultbot arms
Vaultbot to the Rescue
By making a activity primarily based graphical consumer interface (GUI), which integrated rules from SA concept and the psychology behind movement notion, the analysis group has been in a position to deal with these frequent issues.
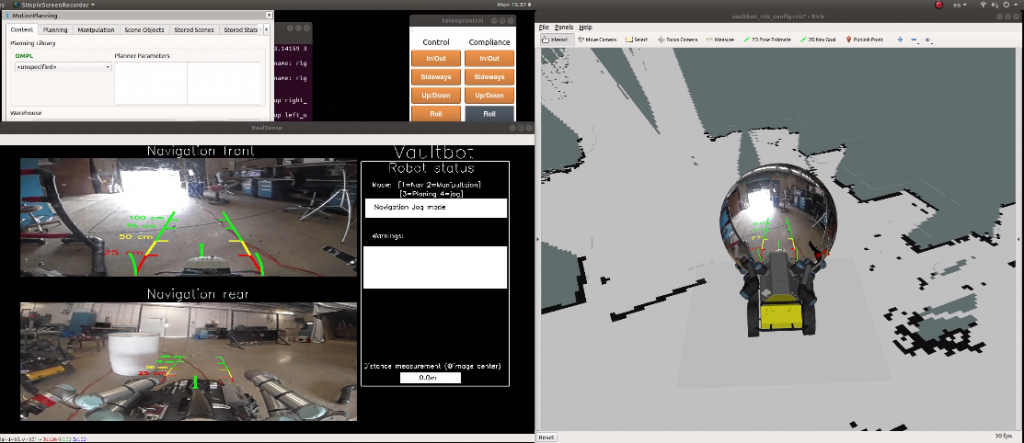
For distant navigation, an built-in display screen reveals the surroundings in two ranges: one, utilizing a 360° digital camera, the operator can see and discover the surroundings from a “driver” viewpoint on a spherical picture. Second, by zooming out, the operator sees the robotic on a map (hen’s-eye view). Whereas shifting the robotic, the consumer sees the rate instructions which were despatched to the robotic, so the consumer could count on the robotic to maneuver after a time frame with extra confidence. By switching to manipulation mode, the consumer sees a distinct display screen which reveals a picture from the gripper viewpoint. A dynamic overlay, which constitutes a digital grip aircraft, offers the depth notion solely on the related area of curiosity. When the thing is shut sufficient for greedy, the thing will override the digital floor.
For the kinesthetic downside, the researchers used a “level sample” that reveals the relative place of the top effector and the robotic base alongside kinematic boundaries to forestall singularities. The picture from the gripper modifications in accordance with the rotation and translation of the gripper for higher spatial notion. After greedy an object, the consumer sees a sign of the utilized forces on the thing which permits the consumer to control the contact forces.
To deal with the latency downside, the consumer sees each the rate instructions from the enter system and a simulated arm that’s aligned with the true arm that strikes with much less latency.
Linear perspective traces view

Gripper view with 2D depth and forces sensing
The Technical Make-up of Vaultbot
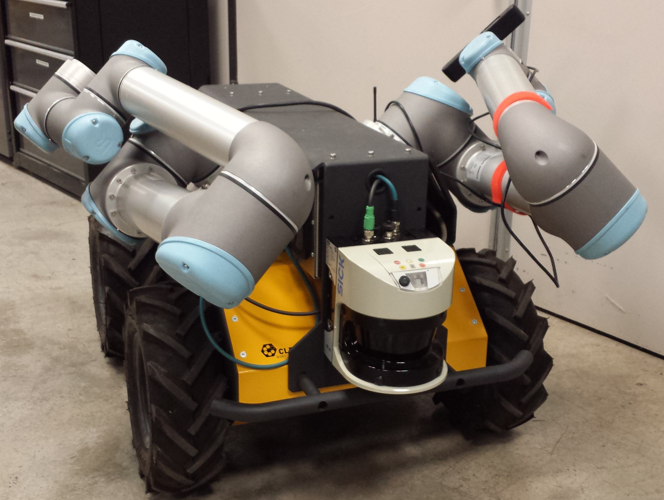
The Vaultbot is constructed on Husky UGV and has two built-in UR5 collaborative robotic arms. The robotic additionally has the next sensors: UM6 inertial measurement unit (IMU), SICK LMS511 2D LIDAR, NetFT drive torque sensor, Intel RealSense D435 cameras and two 4K Kodak PixPro cameras.
The robotic runs on two synchronized ROS melodic masters which run on separate machines with Ubuntu 18.04 OS. One grasp is accountable for your entire robotic besides the cameras, whereas the opposite grasp is totally devoted to the onboard cameras. The motivation for this setup was to offer a protected answer since Vaultbot was designed to work in hazardous environments. Within the occasion that the robotic pc requires a distant reboot because of malfunction, the cameras will keep on and can proceed broadcasting.

The Vaultbot is provided with UM6 inertial measurement unit (IMU), SICK LMS511 2D LIDAR, NetFT drive torque sensor, two built-in UR5 collaborative robotic arms, Intel RealSense D435 cameras and two 4K Kodak PixPro cameras
“Working with Husky UGV has been a extremely nice expertise. Each the {hardware} and software program are steady for prolonged intervals of time. The combination of ROS, software program and sensors couldn’t be easier.” stated Zaidner.
Why They Selected to Construct on Husky UGV
The researchers wanted a cellular platform that was dependable because it was going to be working in harmful environments and in addition strong in order that they may add extra sensors and gear, each of which they discovered with Husky UGV.
“Working with Husky UGV has been a extremely nice expertise. Each the {hardware} and software program are steady for prolonged intervals of time. The combination of ROS, software program and sensors couldn’t be easier.” stated Zaidner. Moreover, Clearpath has confirmed itself to be a dependable and steady vendor assuring that any developed capabilities may be reproduced utilizing their commercially obtainable {hardware}. Clearpath was instrumental in serving to UT Austin develop dual-arm cellular manipulator from commercially obtainable parts with a excessive chance of long-term help.
Vaultbot In The Wild
The Vaultbot has been used to help funded initiatives from Los Alamos Nationwide Labs, Savannah River Nationwide Labs, and several other O&G industrial companions together with Woodside.
The Vaultbot has additionally been featured in varied publications associated to make use of in nuclear environments and has been featured by IEEE Spectrum. The manuscript associated to the featured situational consciousness capabilities is presently beneath improvement.
Click on right here to be taught extra about Husky UGV.
TikTok Cash Free – How I Bought 9999 Cash
TIPS and TRICKS FOR UNLIMITED SPIN for C
How one can Get Limitless SPINS & COINS in Co
Few spins? No downside. Coin Grasp Free
How one can get free of charge spins and cash in C
Get Limitless SPINS in Coin Grasp 2023
Limitless Spins + Cash Hack | How one can ge
How I Bought Free Spins in Coin Grasp iOS/
How I Bought Free Spins in Coin Grasp iOS/
TIPS and TRICKS FOR UNLIMITED SPIN for C
How one can Get Limitless SPINS & COINS in Co
Limitless Spins + Cash Hack | How one can ge
Coin Grasp Free Spins 2023 How To Get F
Coin Grasp Free Spins 2023 How To Get F
How I Bought Free Spins in Coin Grasp iOS/
How You Can Get Limitless Spins In Coin
Get FREE Coin Grasp Spins & Cash 2023
Get FREE Coin Grasp Spins & Cash 2023
How one can make free spins in Coin Grasp NO
How one can get free of charge spins and cash in C
How one can make free spins in Coin Grasp NO
Coin Grasp Free Spins iOS/Android – ABS
Get Limitless SPINS in Coin Grasp 2023
Coin Grasp Free Spins 2023 Coin Grasp
3 Methods to Get UNLIMITED Free Coin Grasp
Few spins? No downside. Coin Grasp Free
How To Get Limitless Spins in Coin Maste
How one can get free of charge spins and cash in C
That is How I bought 1 MILLION Free Spins i
TIPS and TRICKS FOR UNLIMITED SPIN for C
Free $500 Bitcoin Withdraw Each 24 Hour
$25,880 PROFITS – Get 1 BTC For Completl
CLAIM FREE 0.008 BTC Each 2 Hours – Fre
Free Bitcoin – Get $1000’s Value BTC Eve
How one can Earn Free Bitcoin in 2023 (11 Leg
$25,880 PROFITS – Get 1 BTC For Completl
