
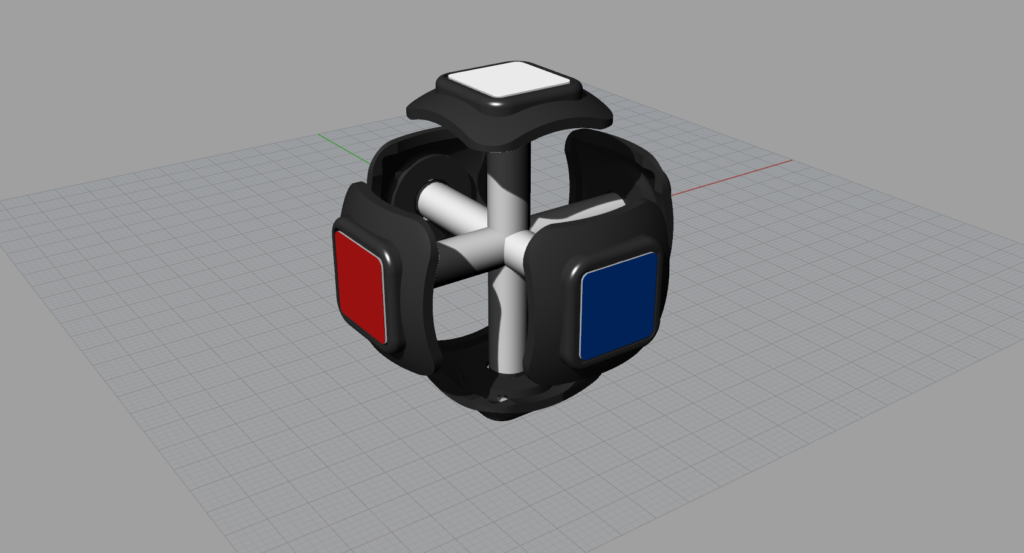
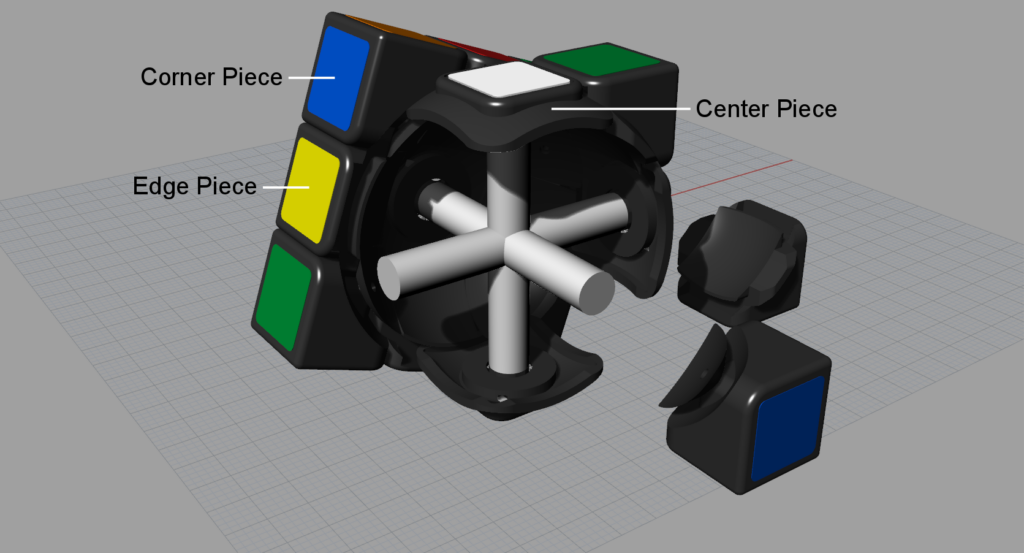
First, there are 6 shafts. The rotatable middle items are connected to the tip of them (Determine A), and there are edge items and nook items across the middle items (Determine B ). While you flip the faces by hand, the sting items and nook items transfer and the colours scramble. The items don’t come off as a result of they’re hooked on one another.
). While you flip the faces by hand, the sting items and nook items transfer and the colours scramble. The items don’t come off as a result of they’re hooked on one another.
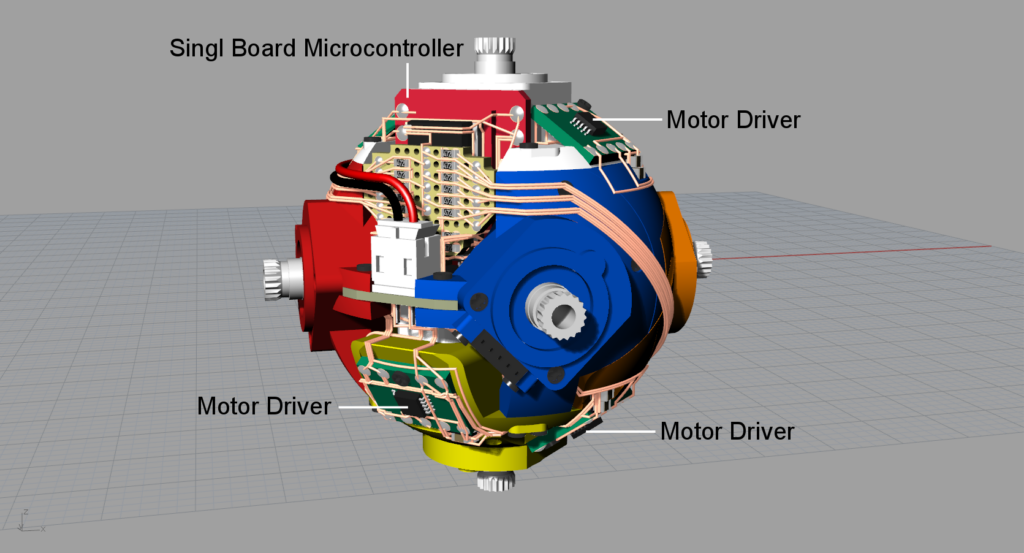
The Self-Fixing Rubikʼs Dice turns the face by turning the shaft with a motor (Determine  C). I put 6 units of gears, motors, motor drivers, and rotary place sensors — together with a single board microcontroller, a battery, and an accelerometer — contained in the Rubikʼs Dice (Figures D
C). I put 6 units of gears, motors, motor drivers, and rotary place sensors — together with a single board microcontroller, a battery, and an accelerometer — contained in the Rubikʼs Dice (Figures D and
and  E).
E).

The accelerometer acknowledges when the Self-Fixing Rubik’s Dice is positioned on the desk. When the microcontroller instructions the motor driver, the motor linked to it rotates, turning the gears, and, in flip, the face.
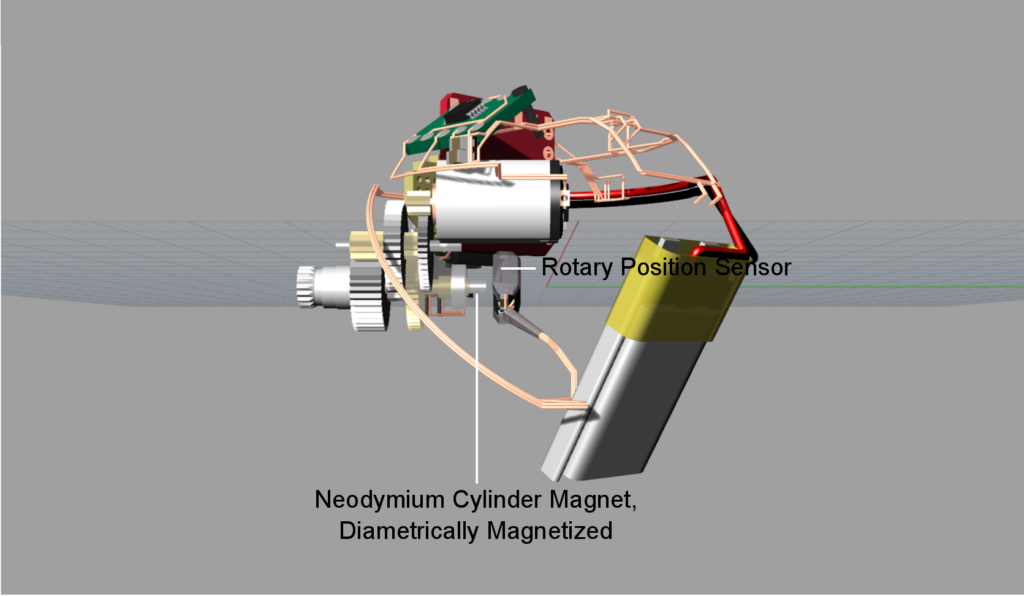
The microcontroller can acknowledge the rotation angle of the shaft with the rotary place sensor, and can command the motor driver to cease the motor when the shaft reaches the goal angle.
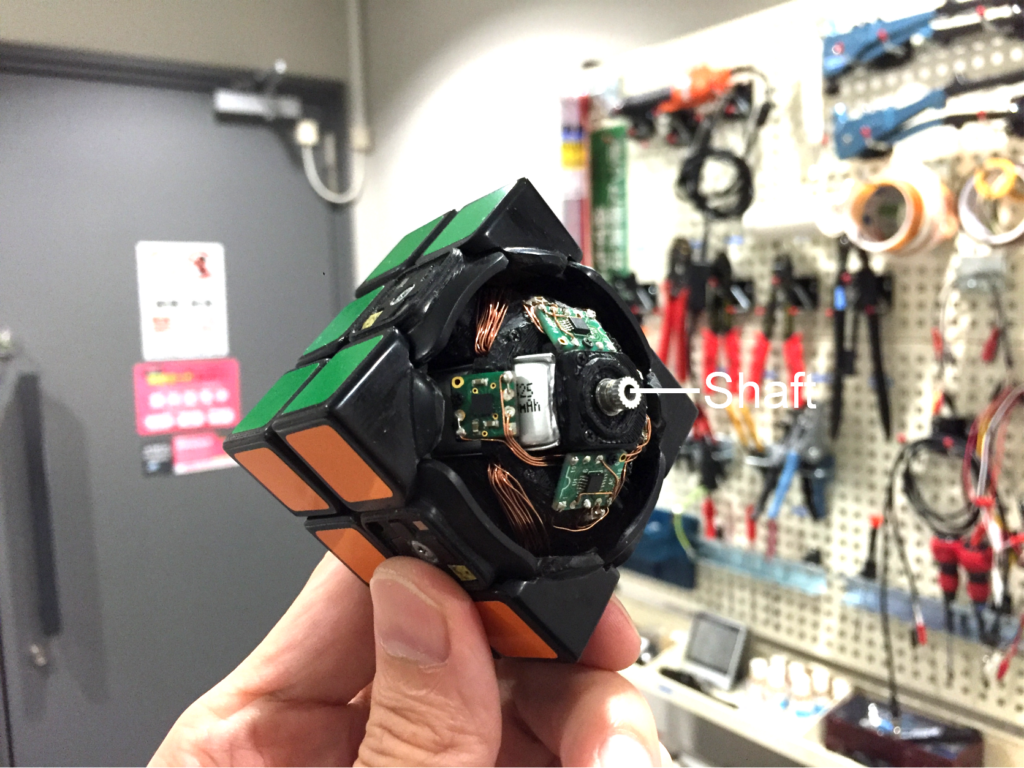
The rotary place sensor I chosen is magnetic. It acknowledges the rotation angle of a diametrically magnetized neodymium cylinder magnet connected to the tip of the shaft
(Determine  F).
F).
My dice, when scrambled and positioned on a desk, begins turning its faces to resolve itself. It acknowledges its colour association and solves from its present state, reasonably than reversing scrambled actions. It really works independently with out the necessity for an exterior pc or cameras, and might clear up itself in about 30 seconds, irrespective of how scrambled.
Many individuals have by no means disassembled a Rubik’s Dice, so I’ll clarify its construction.
First, there are 6 shafts. The rotatable middle items are connected to the tip of them (Determine A), and there are edge items and nook items across the middle items (Determine B). While you flip the faces by hand, the sting items and nook items transfer and the colours scramble. The items don’t come off as a result of they’re hooked on one another.
The Self-Fixing Rubikʼs Dice turns the face by turning the shaft with a motor (Determine C). I put 6 units of gears, motors, motor drivers, and rotary place sensors — together with a single board microcontroller, a battery, and an accelerometer — contained in the Rubikʼs Dice (Figures D and E).
The accelerometer acknowledges when the Self-Fixing Rubik’s Dice is positioned on the desk. When the microcontroller instructions the motor driver, the motor linked to it rotates, turning the gears, and, in flip, the face.
The microcontroller can acknowledge the rotation angle of the shaft with the rotary place sensor, and can command the motor driver to cease the motor when the shaft reaches the goal angle.
The rotary place sensor I chosen is magnetic. It acknowledges the rotation angle of a diametrically magnetized neodymium cylinder magnet connected to the tip of the shaft
(Determine F).