This weblog was initially authored by Gregory Kahn and revealed on UC Berkeley’s BAIR Weblog

Take a look at the pictures above. If I requested you to convey me a picnic blanket within the grassy discipline, would you be capable of? In fact. If I requested you to convey over a cart stuffed with meals for a celebration, would you push the cart alongside the paved path or on the grass? Clearly the paved path.


Prior navigation approaches based mostly purely on geometric reasoning incorrectly assume that tall grass is an impediment (left) and don’t perceive the distinction between a easy paved path and bumpy grass (proper).
Whereas the solutions to those questions could appear apparent, immediately’s cellular robots would possible fail at these duties: they’d assume the tall grass is similar as a concrete wall, and wouldn’t know the distinction between a easy path and bumpy grass. It is because most cellular robots assume purely by way of geometry; they detect the place obstacles are, and plan paths round these perceived obstacles to be able to attain the objective. This purely geometric view of the world is inadequate for a lot of navigation issues. Geometry is just not sufficient.
Can we allow robots to cause about navigational affordances instantly from photographs? We developed a robotic that may autonomously study bodily attributes of the surroundings by way of its personal experiences within the real-world, with none simulation or human supervision. We name our robotic studying system BADGR: the Berkeley Autonomous Driving Floor Robotic.
BADGR works by:
- autonomously accumulating information
- robotically labelling the info with self-supervision
- coaching an image-based neural community predictive mannequin
- utilizing the predictive mannequin to plan into the long run and execute actions that may lead the robotic to perform the specified navigational activity
(1) Information Assortment
BADGR autonomously accumulating information in off-road (left) and concrete (proper) environments.
BADGR wants a considerable amount of numerous information to be able to efficiently learn to navigate. The robotic collects information utilizing a easy time-correlated random stroll controller. Because the robotic collects information, if it experiences a collision or will get caught, the robotic executes a easy reset controller after which continues accumulating information.
(2) Self-Supervised Information Labelling
BADGR then goes by way of the info and calculates labels for particular navigational occasions, such because the robotic’s place and if the robotic collided or is driving over bumpy terrain, and provides these occasion labels again into the dataset. These occasions are labelled by having an individual write a brief snippet of code that maps the uncooked sensor information to the corresponding label. For instance, the code snippet for figuring out if the robotic is on bumpy terrain seems on the IMU sensor and labels the terrain as bumpy if the angular velocity magnitudes are massive.
We describe this labelling mechanism as self-supervised as a result of though an individual has to manually write this code snippet, the code snippet can be utilized to label all current and future information with none extra human effort.
(3) Neural Community Predictive Mannequin

BADGR then makes use of the info to coach a deep neural community predictive mannequin. The neural community takes as enter the present digicam picture and a future sequence of deliberate actions, and outputs predictions of the long run related occasions (corresponding to if the robotic will collide or drive over bumpy terrain). The neural community predictive mannequin is skilled to foretell these future occasions as precisely as doable.
(4) Planning and Navigating
BADGR predicting which actions result in bumpy terrain (left) or collisions (proper).
When deploying BADGR, the consumer first defines a reward perform that encodes the precise activity they need the robotic to perform. For instance, the reward perform may encourage driving in the direction of a objective whereas discouraging collisions or driving over bumpy terrain. BADGR then makes use of the skilled predictive mannequin, present picture commentary, and reward perform to plan a sequence of actions that maximize reward. The robotic executes the primary motion on this plan, and BADGR continues to alternate between planning and executing till the duty is full.
In our experiments, we studied how BADGR can study bodily attributes of the surroundings at a big off-site facility close to UC Berkeley. We in contrast our strategy to a geometry-based coverage that makes use of LIDAR to plan collision-free paths. (However be aware that BADGR solely makes use of the onboard digicam.)
BADGR efficiently reaches the objective whereas avoiding collisions and bumpy terrain, whereas the geometry-based coverage is unable to keep away from bumpy terrain.
We first thought of the duty of reaching a objective GPS location whereas avoiding collisions and bumpy terrain in an city surroundings. Though the geometry-based coverage all the time succeeded in reaching the objective, it did not keep away from the bumpy grass. BADGR additionally all the time succeeded in reaching the objective, and succeeded in avoiding bumpy terrain by driving on the paved paths. Be aware that we by no means informed the robotic to drive on paths; BADGR robotically realized from the onboard digicam photographs that driving on concrete paths is smoother than driving on the grass.
BADGR efficiently reaches the objective whereas avoiding collisions, whereas the geometry-based coverage is unable to make progress as a result of it falsely believes the grass are untraversable obstacles.
We additionally thought of the duty of reaching a objective GPS location whereas avoiding each collisions and getting caught in an off-road surroundings. The geometry-based coverage practically by no means crashed or turned caught on grass, however typically refused to maneuver as a result of it was surrounded by grass which it incorrectly labelled as untraversable obstacles. BADGR nearly all the time succeeded in reaching the objective by avoiding collisions and getting caught, whereas not falsely predicting that each one grass was an impediment. It is because BADGR realized from expertise that the majority grass is in actual fact traversable.
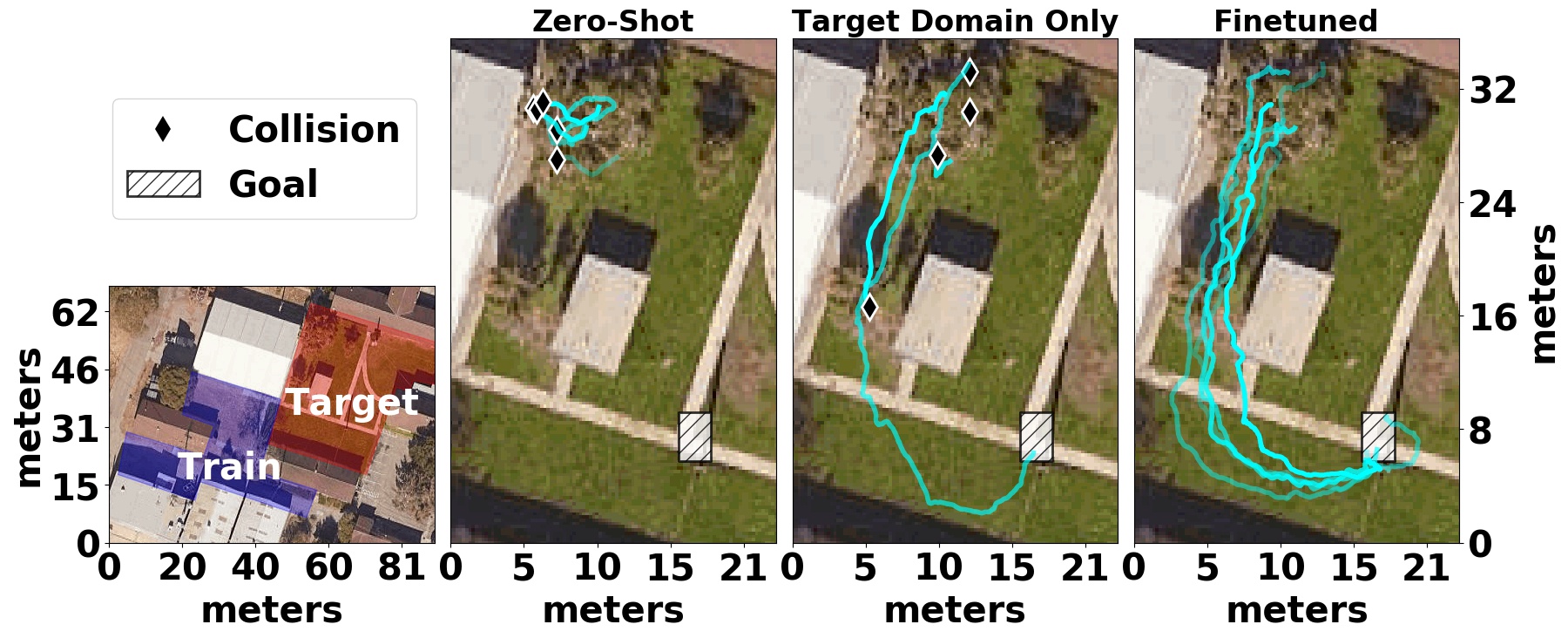
BADGR bettering because it gathers extra information.
Along with having the ability to study bodily attributes of the surroundings, a key facet of BADGR is its skill to repeatedly self-supervise and enhance the mannequin because it gathers increasingly more information. To reveal this functionality, we ran a managed examine by which BADGR gathers and trains on information from one space, strikes to a brand new goal space, fails at navigating on this space, however then finally succeeds within the goal space after gathering and coaching on extra information from that space.
This experiment not solely demonstrates that BADGR can enhance because it gathers extra information, but additionally that beforehand gathered expertise can really speed up studying when BADGR encounters a brand new surroundings. And as BADGR autonomously gathers information in increasingly more environments, it ought to take much less and fewer time to efficiently be taught to navigate in every new surroundings.


BADGR navigating in novel environments.
We additionally evaluated how properly BADGR navigates in novel environments—starting from a forest to city buildings—not seen within the coaching information. This outcome demonstrates that BADGR can generalize to novel environments if it gathers and trains on a sufficiently massive and numerous dataset.
The important thing perception behind BADGR is that by autonomously studying from expertise instantly in the actual world, BADGR can study navigational affordances, enhance because it gathers extra information, and generalize to unseen environments. Though we imagine BADGR is a promising step in the direction of a totally automated, self-improving navigation system, there are a selection of open issues which stay: how can the robotic safely collect information in new environments? adapt on-line as new information streams in? deal with non-static environments, corresponding to people strolling round? We imagine that fixing these and different challenges is essential for enabling robotic studying platforms to be taught and act in the actual world.

Click on right here to learn the group’s authentic analysis paper, and click on right here to be taught extra about Jackal UGV
TikTok Cash Free – How I Obtained 9999 Cash
TIPS and TRICKS FOR UNLIMITED SPIN for C
Easy methods to Get Limitless SPINS & COINS in Co
Few spins? No drawback. Coin Grasp Free
Easy methods to get without spending a dime spins and cash in C
Get Limitless SPINS in Coin Grasp 2023
Limitless Spins + Cash Hack | Easy methods to ge
How I Obtained Free Spins in Coin Grasp iOS/
How I Obtained Free Spins in Coin Grasp iOS/
TIPS and TRICKS FOR UNLIMITED SPIN for C
Easy methods to Get Limitless SPINS & COINS in Co
Limitless Spins + Cash Hack | Easy methods to ge
Coin Grasp Free Spins 2023 How To Get F
Coin Grasp Free Spins 2023 How To Get F
How I Obtained Free Spins in Coin Grasp iOS/
How You Can Get Limitless Spins In Coin
Get FREE Coin Grasp Spins & Cash 2023
Get FREE Coin Grasp Spins & Cash 2023
Easy methods to make free spins in Coin Grasp NO
Easy methods to get without spending a dime spins and cash in C
Easy methods to make free spins in Coin Grasp NO
Coin Grasp Free Spins iOS/Android – ABS
Get Limitless SPINS in Coin Grasp 2023
Coin Grasp Free Spins 2023 Coin Grasp
3 Methods to Get UNLIMITED Free Coin Grasp
Few spins? No drawback. Coin Grasp Free
How To Get Limitless Spins in Coin Maste
Easy methods to get without spending a dime spins and cash in C
That is How I bought 1 MILLION Free Spins i
TIPS and TRICKS FOR UNLIMITED SPIN for C
Free $500 Bitcoin Withdraw Each 24 Hour
$25,880 PROFITS – Get 1 BTC For Completl
CLAIM FREE 0.008 BTC Each 2 Hours – Fre
Free Bitcoin – Get $1000’s Price BTC Eve
Easy methods to Earn Free Bitcoin in 2023 (11 Leg
$25,880 PROFITS – Get 1 BTC For Completl